Hi! I'm Cindy Shao
About Me
I am a master student at the University of Michigan. I am major in Electrical and Computer
Engineering. I focus on machine learning, SLAM, and control. I am also interested in software
development.
I worked as a software summer intern in 2019 in Roche Diagnostics, where studied the
real-world product development process.
I love playing badminton. I have won the champion in the Shanghai College Badminton Competition. I
won prizes in several intercollegiate games with the UM badminton team.
Education
University of Michigan
Master of Science in Electrical and Computer Engineering
GPA: 3.9/4.0
January 2019 - Present
Master of Science in Mechanical Engineering
GPA: 3.9/4.0
September 2018 - Present
Bachelor of Science in Materials Science and Engineering
GPA: 4.0/4.0
September 2016 - April 2018
Course highlights:
Computer Science: Machine Learning, Deep Learning, AI Foundations, Matrix
Methods for Machine Learning.
Robotics: Mobile Robotics, Mechatronic System
Design, Robotics Kinematics, Self-Driving Cars.
I will graduate in 2020 April with both Electrical and Computer Engineering and Mechanical Engineering Master's degree. My major area is signal & image processing and machine learning. During my graduate study, I research on the advanced control of desktop 3D printers from the cloud in Prof. Okwudire's lab. I am also working as a graduate student instructor teaching implementation of the mathematical theory underlying the finite element method using C++ and modern FEM libraries. My undergraduate study developed my engineering thinking. I worked as a research assistant in Prof. Liang Qi's lab on computational materials.
Shanghai Jiao Tong University
Bachelor of Science in Mechanical Engineering
GPA: 3.7/4.0
September 2016 - August 2018
Course highlights:
Data Structure & Algorithm, Linear Algebra
I joined the SJTU-UM Joint Institute after being admitted to the Shanghai Jiao Tong University. After my freshman and sophomore year, I joined the dual degree program with the Univerisity of Michigan. I continue my study at SJTU in both summers of my junior and senior year to accomplish my research and coursework. I have also been the teaching assistant of the Linear Algebra.
Work Experience
Roche
Software Intern
May 2019 - August 2019
My internship is in the Roche Diagnostics development department.
As the development department is expanding to multiple sites, improving communication and
effectiveness is essential. I designed and developed a dynamic website to simplify document
look-up procedures for Roche product developers, based on Bootstrap components and Elasticsearch
engine. The new website harmonized the development processes. The
website helps product development teams on launching high quality and compliant products by
guiding users of the product development process framework and associated tools, harmonizing the
development process.
Moreover, I have worked with the digital pathology imaging project team on applying deep learning
to help with tumor detection. I trained and validated a customized U-Net model on digital
pathology image sets based on Keras. Significantly increased the tumor cells classification
accuracy by involving targeting tile information as new representation vectors.
From the intern experience, I have learned a lot from my colleagues, which gives me more passion for my career path in engineering. I also
have a more detailed understanding of how to apply what I learn to my future industry job.
Projects
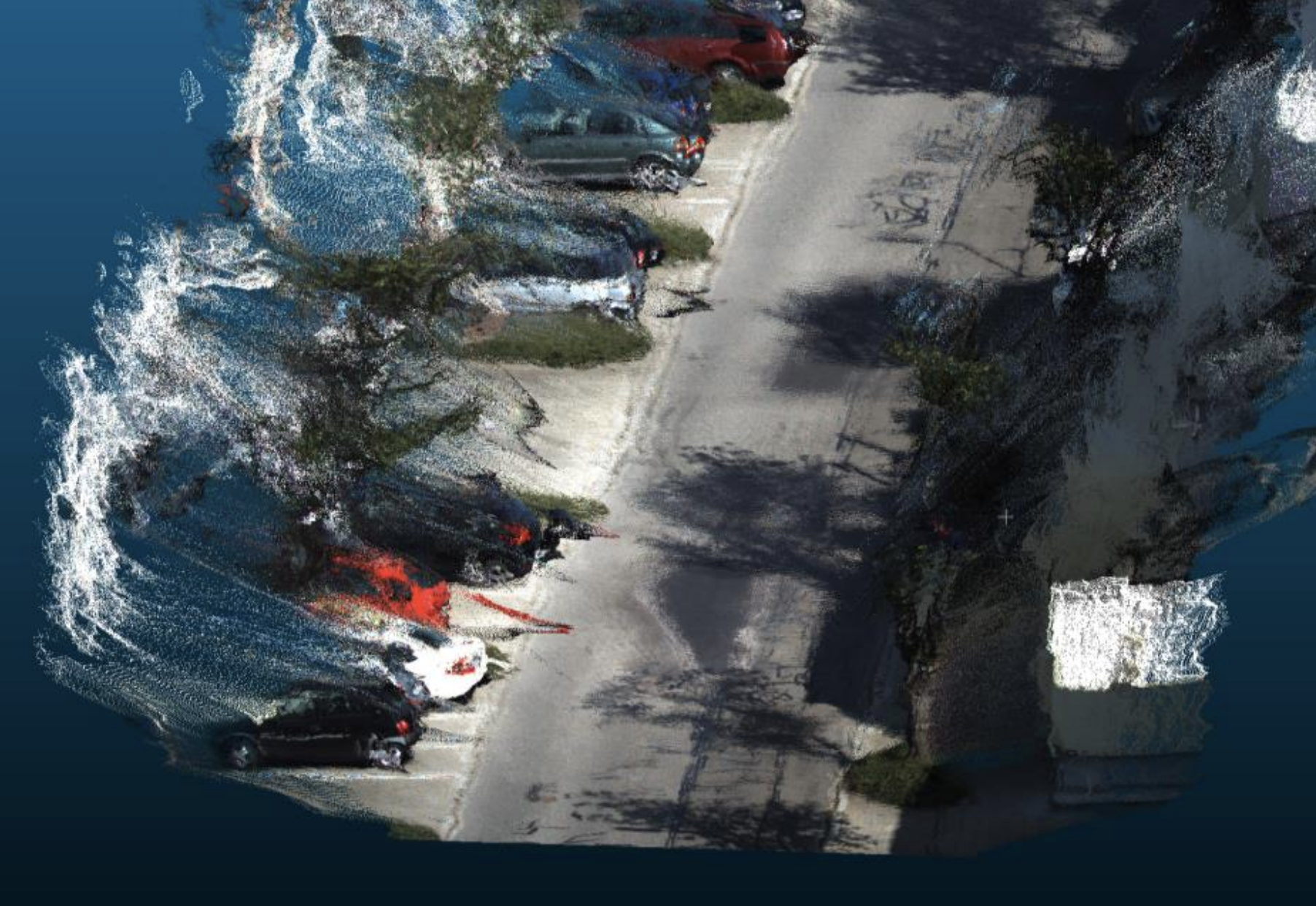
Sparse Map and CNN-built Point Clouds Fusion for High-Fidelity 3D-Map Generation
Mobile Robotics Course Project
February 2019 - April 2019
We proposed and implemented an innovative method to build a denser and more refined 3D map based on the sparse point cloud map generated by VINS algorithm from stereo images. Aligned the dense point clouds by CNN in each frame to the sparse map by ICP and RANSAC algorithms.
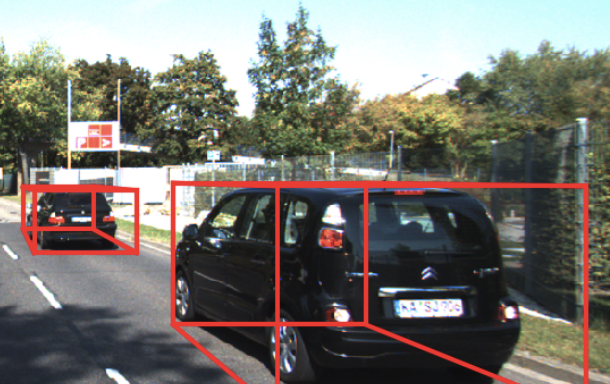
3D Bounding Box Estimation By Monocular Method
Deep Learning Course Project
January 2019 - April 2019
I designed a state-of-the-art DNN pipeline for 3D bounding box estimation. Aggregated monocular depth estimation by ResNet and 2D proposed boxes by Mask-RCNN to infer 3D bounding box predictions. Achieved leading performance on the KITTI dataset in average precision.
Simultaneous Localization and Mapping
Mobile Robotics Course Project
March 2019
I implemented the EKF-SLAM algorithm in MATLAB to have localization and mapping simultaneously on the Victoria Park dataset. The test cases are built with stochastic representations of the environment, odometry motion model and range-bearing sensor model. Nearest Neighbor data association is used to distinguish the landmarks.
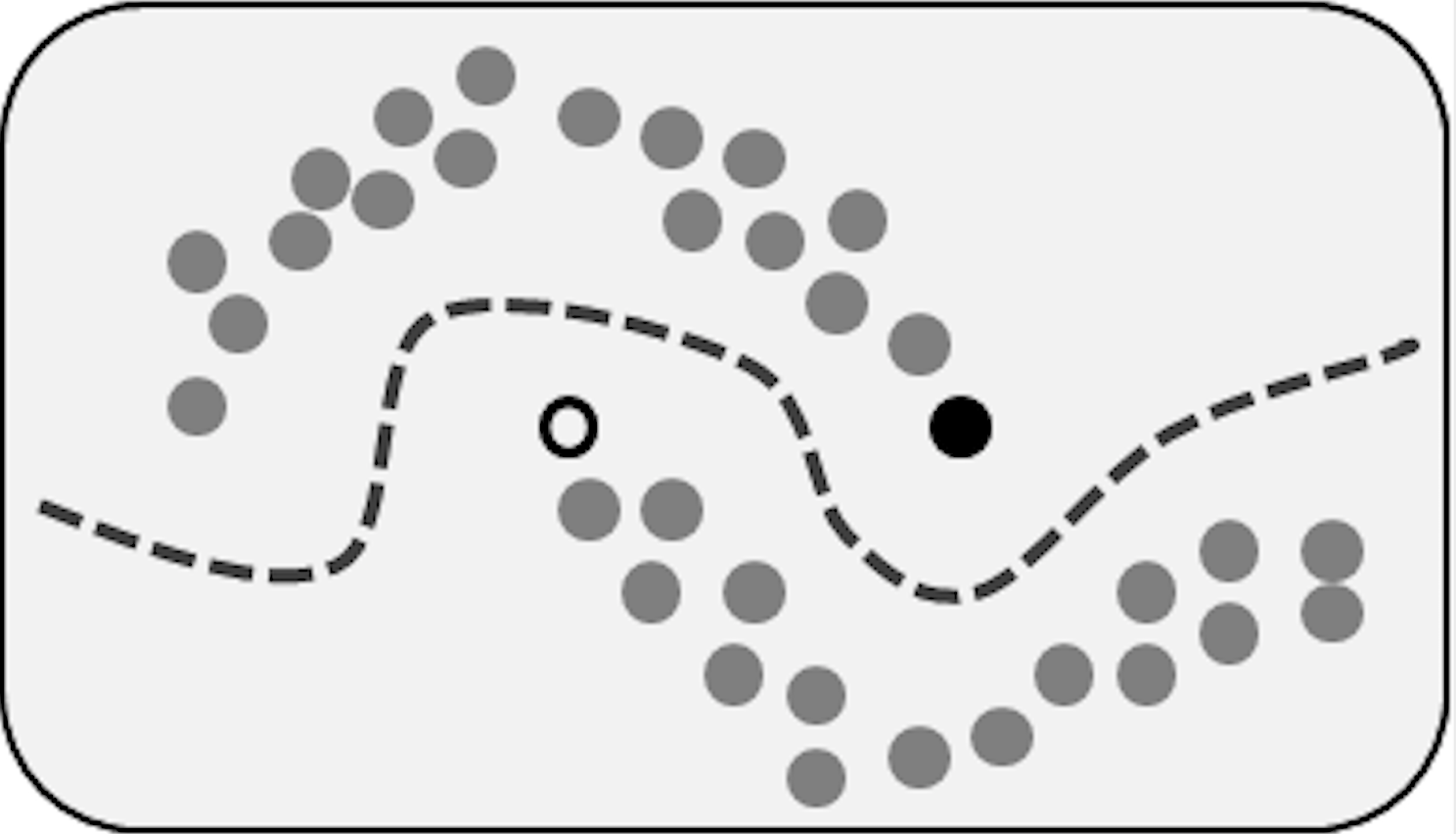
Semi-supervised Learning with Manifold Regularization
Machine Learning Course Project
October 2018 - December 2018
I reconstructed LapSVM and LapRLS algorithms to obtain better performance on partially labeled datasets. Compared their ROC curves with vanilla unsupervised learning algorithm (K-means) and supervised learning algorithms (SVM and RLS) on a customized dataset.
Inverted Pendulum System Controller
Mechatronic System Design Course Project
October 2018
I designed the swing-up controller and the balancing controller for the pendulum. The physical system was composed of a vertical pendulum connected with the horizontal arm which rotated by the DC motor in the center. After identifying physical system parameters with experiments, I designed both the LQR controller and the double loop controller to have the pendulum balanced vertically at the specific position. The performance of the controllers and modeled system were simulated with Simulink to optimize the controller. Then, I Implemented an inverted pendulum system with LabVIEW program controlling the DC motor.
Magnetic Levitation System Controller
Mechatronic System Design Course Project
September 2018
I designed the magnetic levitation system controller to have the iron ball stably levitated in the air. In the system, the photo-detector with the photo-emitter gave the relative position of the iron ball and the electromagnet applied attractive force to the iron ball. After identifying physical system parameters with experiments, I modeled the physical system and simulated the controller in MATLAB. The magnetic levitation system was implemented with LabVIEW.
Robot Web Tool for Kinematic Modeling and Motion Planning
Autonomous Robotics Course Project
October 2018 - November 2018
I Implemented robot forward kinematic, invert kinematic, and motion planning algorithm with JavaScript. Built user interface for task selection and robot control, and used Threejs for the in-browser 3D rendering of the robot parts and the obstacles.
Integrated Virtual Vehicle Simulation Platform on Android
Capstone Design
May 2018 - July 2018
We developed and presented an Android simulation platform to simplify the debugging process for location- related Carplay applications. Populated with plugins like the fake location generator, virtual driving dashboards, and joystick control driver with the Gaode Map SDK and Android Location APIs.

Hydraulic Cylinder Position Sensing
Senior Design
January 2018 - April 2018
We designed and manufactured the testing fixture of the hydraulic cylinder by conducting finite element analysis on the testing fixture with COMSOL, optimizing the piston position test accuracy. Evaluated and tested the accuracy of the piston position measurement of both LTF laser sensors and the QVLA light sensors, assisting the sponsor in making the investment decision.